什么是伺服電機
編輯伺服電機是一個旋轉致動器或線性致動器,其允許角速度或線的位置,速度和加速度的精確控制。它包括一個與傳感器相連的合適的電動機,用于位置反饋。它還需要相對復雜的控制器,通常是專門設計用于伺服電機的專用模塊。
盡管術語“?伺服電動機”通常用于表示適用于閉環控制系統的電動機,但伺服電動機不是特定的電動機類別。
機制
編輯伺服電機是一種?閉環?伺服機構,它使用位置反饋來控制其運動和最終位置。控制輸入??是代表輸出軸指令位置的信號(模擬或數字)。
電機與某種類型的位置編碼器配對以提供位置和速度反饋。在最簡單的情況下,僅測量位置。將測量的輸出位置與命令位置(控制器的外部輸入)進行比較。如果輸出位置與要求的位置不同,則會生成一個錯誤信號,然后根據需要將電動機沿任一方向旋轉,以將輸出軸移至適當的位置。隨著位置的接近,誤差信號減小到零,并且電動機停止。

最簡單的伺服電動機通過電位計和電動機的爆炸聲控制使用僅位置感測;電動機始終以全速旋轉(或停止)。這種類型的伺服電機并未廣泛用于工業運動控制中,但它構成了用于無線電控制模型的簡單廉價的伺服器的基礎。
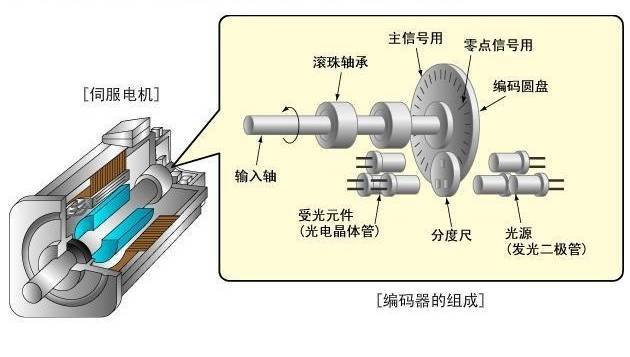
更復雜的伺服電動機使用光學旋轉編碼器測量輸出軸的速度,并使用變速驅動器來控制電動機的速度。這兩種增強功能通常與PID控制算法結合使用,可以使伺服電動機更快,更精確地到達其指令位置,而不會出現過沖現象。
伺服電動機與步進電動機
伺服電機通常用作步進電機的高性能替代產品。步進電機具有內置的輸出步長,因此具有控制位置的固有能力。這通常使它們無需任何反饋編碼器即可用作開環位置控制,因為它們的驅動信號指定了旋轉運動的步數,但是為此,控制器需要“知道”步進電機的位置開機。因此,在xxx次加電時,控制器將必須啟動步進電機并將其旋轉到已知位置,例如直到啟動終端限位開關為止。在打開噴墨打印機時可以觀察到這一點;?控制器會將噴墨打印機的托架向左和向右移動,以建立最終位置。無論通電時的初始位置如何,伺服電動機都將立即旋轉至控制器指示的任何角度。
步進電機缺乏反饋會限制其性能,因為步進電機只能驅動負載能力范圍內的負載,否則負載下的失步可能會導致定位錯誤,并且系統可能必須重新啟動或重新校準。伺服電機的編碼器和控制器是額外的成本,但相對于基本電機的容量,它們可以優化整個系統的性能(在速度、功率和精度方面均達到最佳)。在大型系統中,強勁的電機占系統成本的比例越來越大,伺服電機具有優勢。
近年來,閉環步進電機越來越流行。他們像伺服電機,但在他們的軟件控制的一些差異,以獲得平滑的運動。閉環步進電機的主要優點是其成本相對較低。也無需在閉環步進系統上調整PID控制器。
諸如激光切割機之類的許多應用可以提供兩個范圍,一個是步進電機的低價范圍,另一個是使用伺服電機的高性能范圍。
編碼器
編輯開發了xxx批以同步器為編碼器的伺服電機。在第二次世界大戰期間,這些系統在雷達和高射炮的開發方面已經完成了許多工作。
簡單的伺服電機可以使用電阻式電位器作為其位置編碼器。這些僅在最簡單和最便宜的水平上使用,并且與步進電機競爭激烈。它們在電位計軌道中遭受磨損和電噪聲的困擾。盡管可以對其位置信號進行電微分以獲得速度信號,但是可以利用這種速度信號的PID控制器通常需要更精確的編碼器。
現代伺服電機使用旋轉編碼器,無論是xxx或增量。xxx編碼器可以在上電時確定其位置,但更為復雜和昂貴。增量式編碼器更簡單,更便宜且工作速度更快。增量系統(如步進電機)通常將其固有的測量旋轉間隔的能力與簡單的零位傳感器結合起來,以在啟動時設置其位置。
有時使用帶有單獨的外部線性編碼器的電機代替伺服電機。這些電動機+線性編碼器系統避免了電動機和線性滑架之間傳動系統的不準確性,但是由于它們不再是預先包裝的出廠制造系統,因此其設計變得更加復雜。
馬達
編輯電動機的類型對于伺服電動機并不重要,可以使用不同的類型。由于其簡單性和低成本,最簡單的是使用有刷永磁直流電動機。小型工業伺服電動機通常是電子換向的無刷電動機。對于大型工業伺服電動機,通常使用交流感應電動機,通常使用變頻驅動器來控制其速度。為了在緊湊的包裝中實現出色的性能,使用了具有永磁場的無刷交流電動機,這是大型的無刷直流電動機。
伺服電機的驅動模塊是標準的工業組件。他們的設計是電力電子技術的一個分支,通常基于三相MOSFET或IGBT?H橋。這些標準模塊接受單個方向和脈沖計數(旋轉距離)作為輸入。它們還可能包括超溫監控,超扭矩和失速檢測功能。由于編碼器的類型,齒輪減速比和整個系統的動態特性是特定于應用的,因此將整個控制器作為現成的模塊生產會更加困難,因此通常將其作為主控制器的一部分來實現。
控制
編輯大多數現代伺服電機都是圍繞同一制造商的專用控制器模塊設計和提供的,也可以圍繞微控制器開發控制器,以降低大批量應用的成本。
集成伺服電機
集成伺服電機的設計使其可以將電機,驅動器、編碼器和相關的電子設備集成到一個包裝中。
內容由匿名用戶提供,本內容不代表www.gelinmeiz.com立場,內容投訴舉報請聯系www.gelinmeiz.com客服。如若轉載,請注明出處:http://www.gelinmeiz.com/107425/